
ミシガンサイエンティフィックコーポレーション ホイールパルストランスデューサー(WPT) は、車両のホイールに取り付けるように設計されたコンパクトなエンコーダシステムです。 WPTからのエンコーダ信号を使用して、 回転速度、角度位置、ホイールの回転方向。 これらの測定値は、電気自動車の開発や自動運転車の追跡などのアプリケーションで車両の位置を追跡するために一般的に使用されます。
自動運転車の追跡
自動運転車は、グローバル ナビゲーション サテライト システム (GNSS) テクノロジに依存して位置を追跡しますが、これらのシステムは、都市、屋内、または地下環境では機能しなくなる可能性があります。 GNSS 追跡が利用できない地域では、ホイール パルス トランスデューサや加速度計などの他の技術を使用して、車両の位置を追跡する必要があります。 WPT システムは、倉庫内の自律型フォークリフトや自律型地下鉱山設備の位置を追跡するために使用できます。 さらに、WPT システムは、加速度計ベースのシステムの精度をテストおよび検証するために使用できます。
WPT センサーの説明
アセンブリは次のように設計されています。 車のホイールにすばやく簡単に取り付けます。 そのコンパクトで軽量な設計は、頑丈なハウジング内の電子機器で構成されています。 WPT は次の方法でホイールに取り付けられます。 クイックコネクトラグナットコレット または拡張ラグ ナット。 アダプター プレートとクイック コネクト ラグ ナット コレットには、さまざまなサイズと構成があり、標準的なホイールの寸法に適合します。 あ 磁気車両固定子拘束 および拘束ロッドは、センサーが車両で使用されている間、エンコーダー モジュールのステーターを所定の位置に保持するために使用されます。 車両試験の性質上、WPT は非常に頑丈に設計されています。 IP67 定格のロータリー シールを備えた WPT は、雨、雪、または汚れた環境でのテストに最適です。
車のホイールにすばやく簡単に取り付けます。 そのコンパクトで軽量な設計は、頑丈なハウジング内の電子機器で構成されています。 WPT は次の方法でホイールに取り付けられます。 クイックコネクトラグナットコレット または拡張ラグ ナット。 アダプター プレートとクイック コネクト ラグ ナット コレットには、さまざまなサイズと構成があり、標準的なホイールの寸法に適合します。 あ 磁気車両固定子拘束 および拘束ロッドは、センサーが車両で使用されている間、エンコーダー モジュールのステーターを所定の位置に保持するために使用されます。 車両試験の性質上、WPT は非常に頑丈に設計されています。 IP67 定格のロータリー シールを備えた WPT は、雨、雪、または汚れた環境でのテストに最適です。
エンコーダシグナルコンディショナ
5,000 回転あたり最大 360 パルス (ppr) の WPT 光学式エンコーダの分解能が利用可能です。 標準解像度には、512 ppr、1024 ppr、5,000 ppr、および 90 ppr が含まれます。 リクエストに応じて、追加の解像度を利用できます。 すべてのエンコーダーの選択肢には、A、B、I、および A⊕B の 0 つの標準エンコーダー出力があります。 出力 A と B は直交しています。つまり、位相が 5 度ずれています。 出力 A⊕B は XNUMX つのチャネルの排他的 OR であり、エンコーダの標準解像度を XNUMX 倍にします。 XNUMX ~ XNUMX のデジタル ボルト パルスの出力は、TTL 負荷を駆動できます。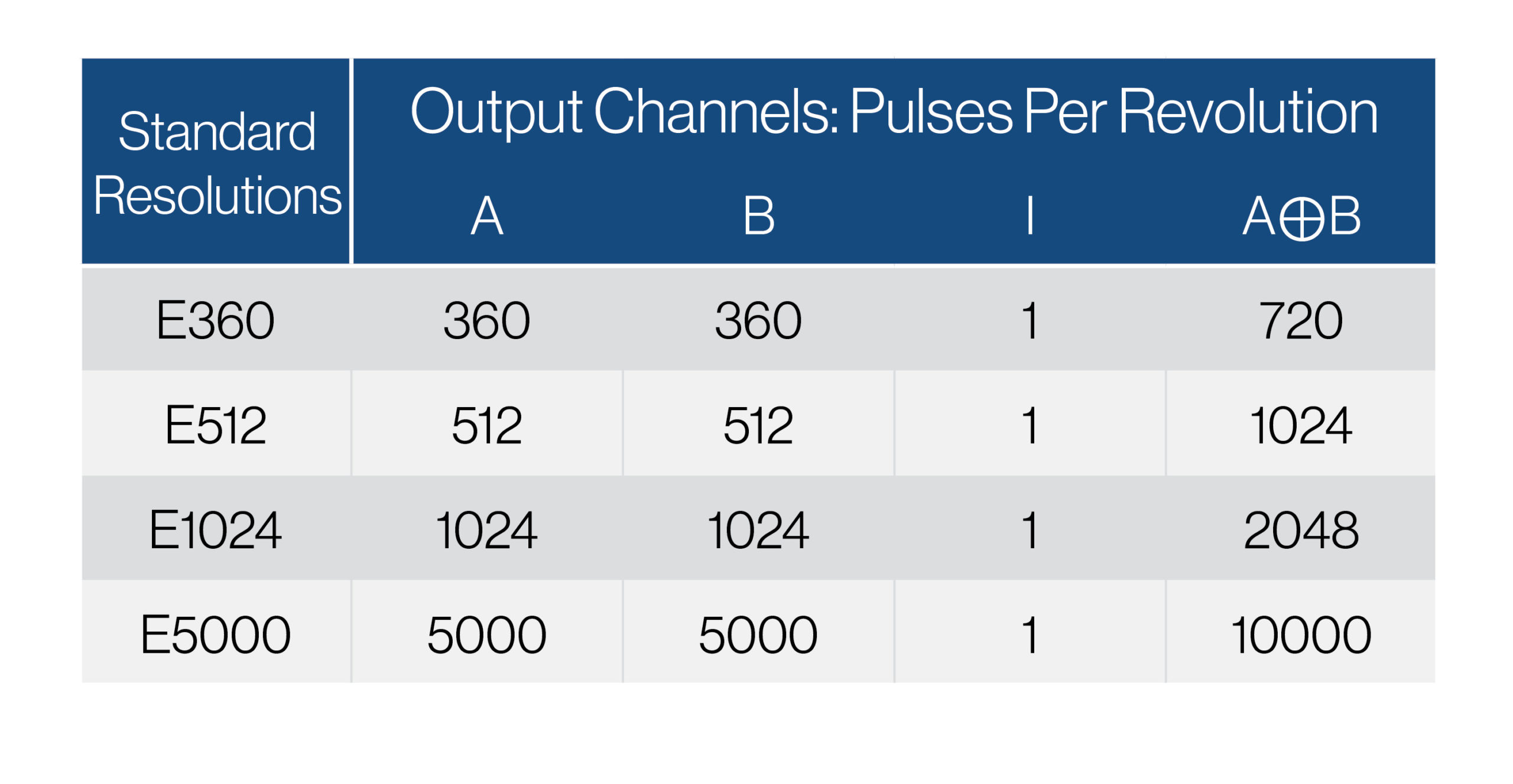
ミシガンサイエンティフィック EC-LVエンコーダ信号コンディショナー WPT センサー エンコーダーの 0 ~ 5 のデジタル ボルト パルスを、角度位置と角速度に比例する線形電圧に変換します。 EC-LV はステータ ケーブルとインラインで追加でき、追加のプログラミングは必要ありません。 外部スイッチにより、ユーザーは速度範囲と回転方向を選択できます。
Wheel Pulse Transducerをアプリケーションに使用する方法について詳しく知りたい場合は、 ミシガン科学代表に連絡する 。