
ミシガンサイエンティフィック 高解像度ホイールパルストランスデューサ (WPT)は光学式エンコーダです ラグナットに取り付けます 車両のホイールの。 WPTは通常、車両管理やフリート管理などのアプリケーションで車両の位置と速度を追跡するために使用されます。 自動運転車の追跡。 このケーススタディでは、XNUMXつのホイールパルストランスデューサを一緒に使用して、位置と速度の測定値をGPSデータと比較することの精度を示します。
使い方
エンコーダからの信号は、ホイールの角位置と速度を計算するために使用されます。 車の両側にある10,000つのWPTによって記録されたデータを平均して中心を見つけることができるため、車が移動した距離と速度を最も正確に表すことができます。 マッピング車両は、多くの場合、WPTを使用してGPS信号の中断を補正し、信号損失中に移動した距離を追跡できるようにします。 この研究では、WPTデータの高解像度は、XNUMX Hzの高いサンプリングレートのために、使用されたGPSセンサーの高解像度よりもはるかに優れたパフォーマンスを示しました。
テストのセットアップ
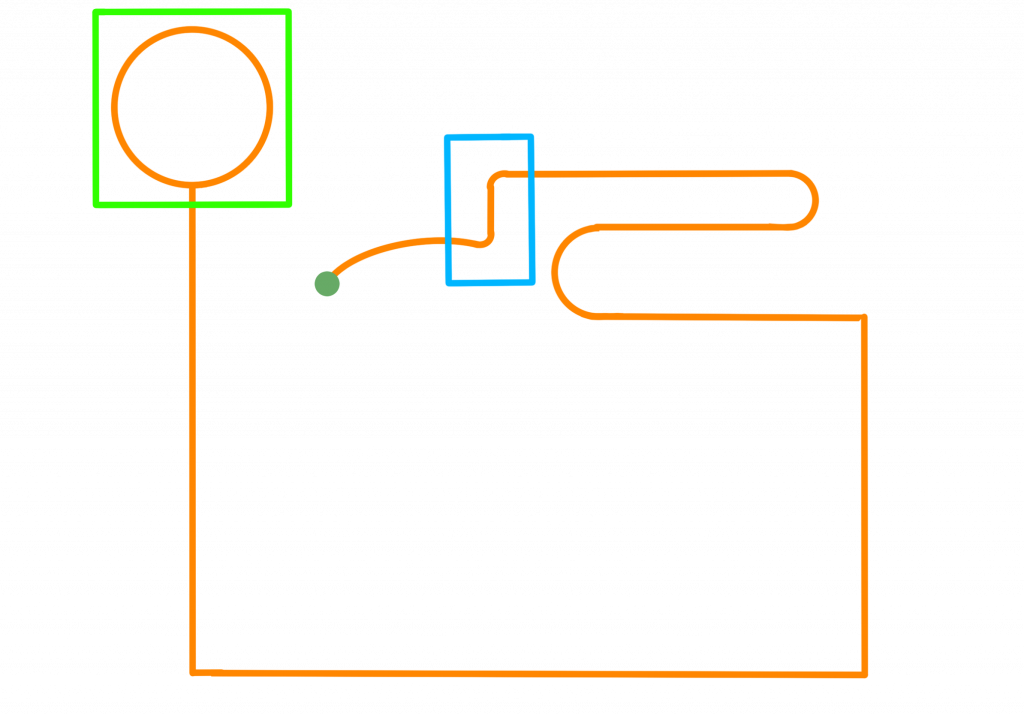
Wheel Pulse Transducerの結果をGPSの結果と比較するために、XNUMXつのWPTシステムが車両に取り付けられました。XNUMXつは後部右側に、もうXNUMXつは後部左側にあります。 トランスデューサーは後輪に組み立てられているため、前輪の回転運動をデータで補正する必要はありません。 GPSデバイスは、車両の上部、後輪の上の屋根の中央に配置され、最も正確な読み取りが可能になります。 左右のWPTの距離と速度は、車両の中心にあるGPS信号と一致するように平均化されました。 以下に示すXNUMXマイルのコースには、GPSからの緯度と経度のプロットとともに、ラウンドアバウトとジグザグ操作が含まれています。
テストトラックの概要
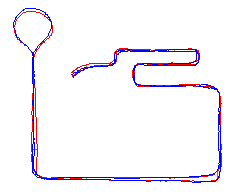
テストトラックからのGPSデータ
ループ
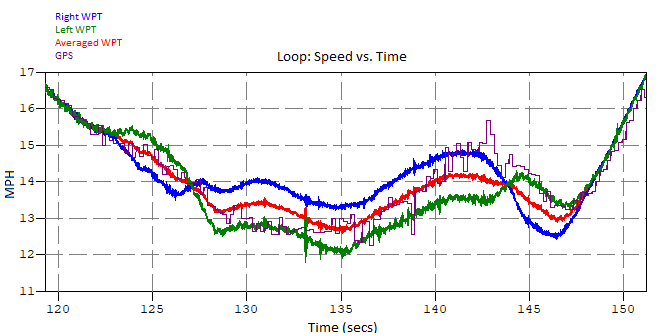
テストトラックの円形部分(上の緑色で表示)を反時計回りに回ると、右のホイールの速度と距離が左よりもはるかに高くなることが予想されます。 以下に示すデータを見ると、これは真実であることがわかります。 右(青)と左(緑)のホイール速度は平均化され(赤)、GPSデータ(紫)とほぼ完全に一致します。
ジグザグパス
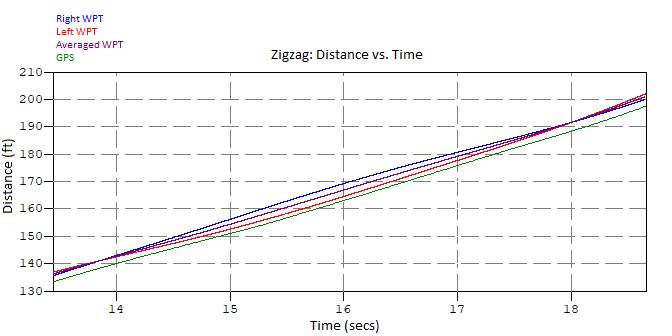
テストトラックの輪郭の青い四角の中に示されている、右と左への素早いターンを含む領域は、別の興味深い視点を提供します。 以下の速度プロットでは、車両はすばやく左に曲がり、次にすぐに右に曲がりました。 これによって作成された「W」字型は、左のホイール(紫)が左のターンの周りで右(緑)よりも遅くなり、次に左のホイールが右のターンの周りで右より速く進んだことを示しています。 機動全体でXNUMXつの反対側が場所を交換しますが、計算された平均(赤)とGPSデータ(青)は中央で接近したままです。
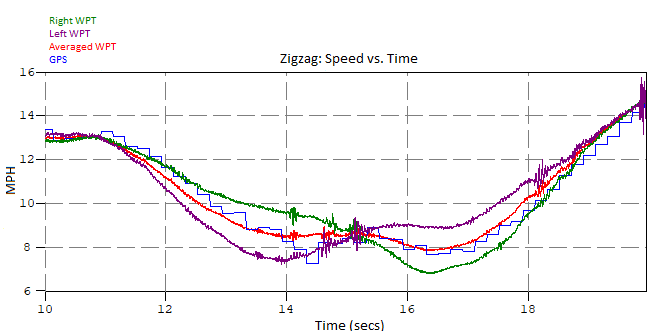
下のグラフの14つの交点の間の時間は、左折と右折が発生した場所です。 右輪(青)は左輪(赤)を上回り、左折時の半径が大きく、約15.5秒で終了し、約17秒で終了します。 この時点で、右のホイールは左のホイールよりも遠くまで移動しています。 右折は18秒前に始まり、左輪は約XNUMX秒で曲がるまでに右輪に追いつきます。 平均(紫)の移動距離は、XNUMXつの間の中心にとどまります。 平均距離とGPSの傾きは同じであるため、同じ速度と距離の変化を記録しています。 ただし、GPSはホイールから数フィート遅れているため、データにわずかなオフセットがあります。
エラー
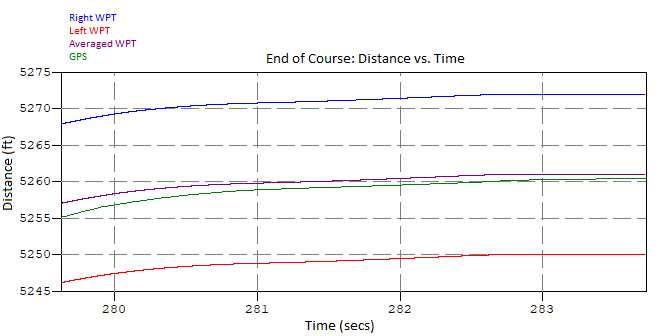
テストの最後のいくつかのデータポイントは、0.22つではなく0.0115つのWPTを使用することの利点を示しています。 WPTが19つだけ使用された場合、記録された距離の最大誤差はXNUMX%になります。 ただし、XNUMXつのWPTを取り付けて平均すると、誤差はわずかXNUMX%で、XNUMX分のXNUMXに減少します。これは、XNUMXつのホイールパルストランスデューサを使用すると、複数のターンにわたって蓄積する可能性のある誤差を減らすのに役立つことを示しています。
このテストは、ホイールパルストランスデューサを利用するさまざまなテストのXNUMXつにすぎません。 耐久性のある正確な測定システムを持つことは、あらゆる環境で車両の位置と速度を正確に追跡するために有益です。 ホイールテストアプリケーションについて話し合いたい場合は、 ミシガン科学の代表者に連絡する 。